hinf.m ����� d ���Ѳ������Ƥ��� forʸ �����ǥ������Խ����ơ�d ���Ѳ������ϰϤ���ꤷ�ޤ���
�ǽ�ϡ��Խ���������˿ʤ�Ǥ���������
.... % ������������õ�� dk_hist = []; k_opt_global = 0; for d = 5:2:15 % �������Խ� % ��ʬˡ�ˤ�� k �κ��粽 k_opt_local = 0; k_low = 0.1; k_high = 10.; .....�����Ǥϡ�d �� 5 ����Ϥޤäơ�2 �����ߤ� 15 �ޤ����ä��ޤ���
�ʲ��Τ褦�� hinf �����Ϥ���ȡ� ���̲��ץ��ȤΥǡ������ɤ߹��ޤ졤����郎�߷פ���ޤ�:
>> hinf d = 5.000000, k = 5.050000 ... infeasible d = 5.000000, k = 2.575000 ... infeasible d = 5.000000, k = 1.337500 ... feasible d = 5.000000, k = 1.956250 ... infeasible d = 5.000000, k = 1.646875 ... feasible d = 5.000000, k = 1.801562 ... feasible d = 5.000000, k = 1.878906 ... feasible d = 5.000000, k = 1.917578 ... infeasible d = 5.000000, k = 1.898242 ... infeasible d = 5.000000, k = 1.888574 ... feasible d = 7.000000, k = 5.050000 ... infeasible d = 7.000000, k = 2.575000 ... infeasible (��ά) d = 15.000000, k = 1.724219 ... feasible d = 15.000000, k = 1.762891 ... infeasible d = 15.000000, k = 1.743555 ... infeasible d = 15.000000, k = 1.733887 ... feasible points completed.... 1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17. 18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35. 36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53. 54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71. 72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89. 90.91.92.93.94.95.96.97.98.99.100.101.102.103.104.105.106.107. 108.109.110.111.112.113.114.115.116.117.118.119.120.121.122.123.124.125. 126.127.128.129.130.131.132.133.134.135.136.137.138.139.140.141.142.143. 144.145.146.147.148.149.150.151.152.153.154.155.156.157.158.159.160.161. 162.163.164.165.166.167.168.169.170.171.172.173.174.175.176.177.178.179. 180.181.182.183.184.185.186.187.188.189.190.191.192.193.194.195.196.197. 198.199.200.201.202.203.204.205.206.207.208.209.210.211.212.213.214.215. 216.217.218.219.220.221.222.223.224.225.226.227.228.229.230.231.232.233. 234.235.236.237.238.239.240.241.242.243.244.245.246.247.248.249.250.251. 252.253.254.255.256.257.258.259.260.261.262.263.264.265.266.267.268.269. 270.271.272.273.274.275.276.277.278.279.280.281.282.283.284.285.286.287. 288.289.290.291.292.293.294.295.296.297.298.299.300.����������Ѳ������ϰϤ�Ŭ�ڤǤ���С� d �� k �Υ���դϰʲ��Τ褦�ˡ������褽����̤η��ˤʤ�ޤ���
�����ʤ�ʤ����ϡ�d ���Ѳ������ϰϡ����ƥåפ�Ŭ���ѹ���������������߷פ�ԤäƤ���������

k ���Ǥ��礭���ʤä���������郎�ե����� controller.dat �˥����֤���ޤ���
���Υǡ������Ѥ��ơ���ξò�����¸���Ԥ��ޤ���
hinf.m ��ư�����ȡ���Υ���դ�¾�ˡ������� Bode ���ޤȡ��ĥ롼�Ϥκ����ð��ͤΥ���դ�ɽ������ޤ���
- ������ Bode ���ޤƤ���������
��:
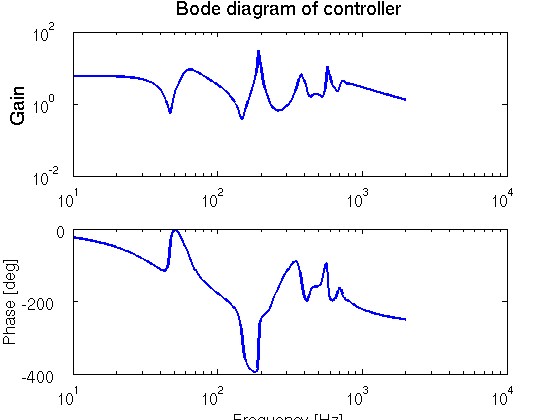
�����������ˤϤ����Ĥ��ԡ���������ޤ����������ϡ�Gzw, Gzu, Gyw, Gyu �ȴط����Ƥ��ޤ���
���Τ褦��ʣ���������ϡ�PID ����Ǥ����뤳�Ȥ��Ǥ��ޤ���(�����μ�������ʤ�)��
���Τ褦��ʣ��������郎��ưŪ�������뤳�Ȥ� H�� ����ΰ�Ĥ������Ǥ���
- �ĥ롼�Ϥκ����ð��ͤΥ���դƤ���������
��:

������Ǥϡ��� 200Hz �ǡ������ð��ͤ��Ǥ��礭���ͤ�ȤäƤ��ޤ���
���μ��ȿ��ն�ǡ��Ť� W(s) �Υ������Ǥ����������������С� k ���ͤ����礭�����뤳�Ȥ��Ǥ���������ǽ�����夷�ޤ���