つぎのように入力してください:
>> nominal
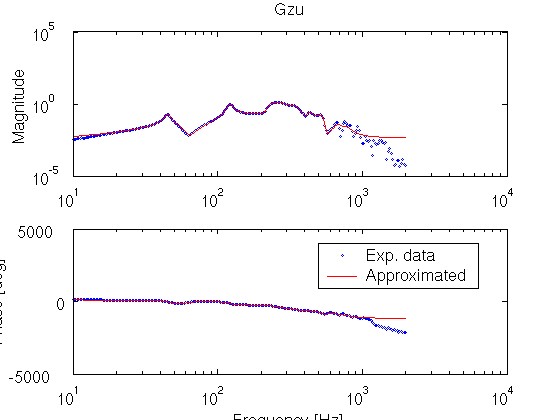
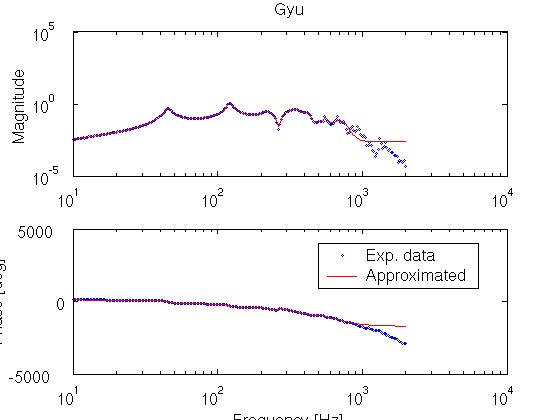
周波数応答実験の結果を近似して,4 つの伝達関数 Gzw(s), Gyw(s), Gzu(s), Gyu(s) を求め,その Bode 線図を周波数応答実験結果に重ねて表示します.
実験点(青)と近似曲線(赤)が大体重なっていることを確認してください.
約 40Hz 以下の低周波域と約 400Hz 以上の高周波域では,両者は重なっていなくても構いません.
実行例:
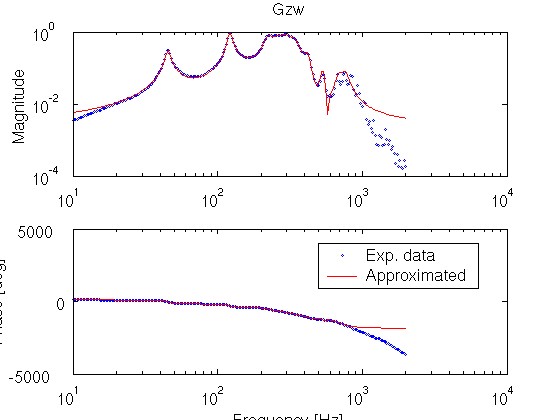
Gzw の周波数応答(実験結果,青点)とノミナルモデルの Bode 線図

Gzw の周波数応答(実験結果,青点)とノミナルモデルの Bode 線図
Gzw の周波数応答(実験結果,青点)とノミナルモデルの Bode 線図
Gzw の周波数応答(実験結果,青点)とノミナルモデルの Bode 線図
つぎのように入力してください:
>> weight
Gyu(s) のモデル化誤差と重み関数のゲイン特性が表示されます.
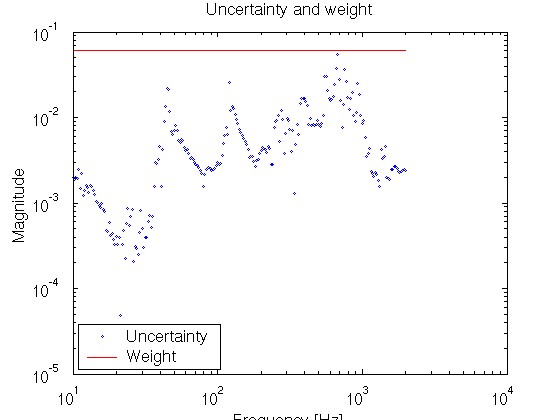
加法的摂動と重み関数のゲイン特性
このグラフを見て,重み関数のパラメータを調節します.
重み関数のゲイン(赤線)が,モデル化誤差(青点)を タイトに上から覆うように 重み関数のパラメータを調整してください.
すき間をあけすぎると,制御性能を良くすることができません.
逆にモデル化誤差よりも重み関数が小さくなってしまうと, 制御系が不安定になることがあるので注意してください.
具体的には, ファイル weight.m の以下の部分をテキストエディタで編集します.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 加法的摂動の重み関数を設定 % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% w0 = 0.016; w1 = 2*pi*60; w2 = 2*pi*400; W = nd2sys(w0*w2*[1, w1], w1*[1, w2]);上の例では,以下のように W(s) を設定しています:
nd2sys の第一引数 w0*w2*[1, w1] が W(s) の分子多項式を表し, 第二引数 w1*[1, w2] が分母多項式を表しています.